中型ロボット以上は搭載可能な機器サイズや重量にも若干の余裕が出るため、小型パソコンや小型カメラの搭載が容易です。弊社の中型ロボットの重量は10キログラム程度であり、身長1メートルサイズのロボットとしては軽量なので、一人で持ち上げたり移動したりできて試験などの運用が比較的容易です。制御コントローラやシステム構成はロボットの全サイズで共通なので、小型ロボットから中型ロボットへの移行も容易です。
現在の中型ロボットの主流は39号機です。 39号機は国産のヴイストン社が販売する高トルクサーボモータを使用しています。平地における歩行の正確さ向上のために脚部に平行リンク機構を採用しています。サーボモータは、韓国Robotis社、国産のフタバ社の製品に置き換えることも可能です。
ロボカップヒューマノイドリーグTEENサイズ参戦用キットの販売も行っています。ユーザーはロボットの世界的なサッカー競技大会「ロボカップ」で世界一を達成した実績(千葉工業大学のCIT Brainsチーム)があります。
これらの中型ロボットは、ホビー用途の市販モータを使用しているので精度や耐久性を重視する場合は、産業用サーボモータを使用する大型ヒューマノイドロボットをお勧めします。
アカデミック用途につきましては、ロボット納品時にロボットの3D CADデータや、ソフトウェアのソースコードもご提供可能です。
-

- HAJIME ROBOT 39 <使用例>ロボカップのCIT Brainsチーム(千葉工業大学)
仕様
| はじめロボット39号機 | |
| 全高 | 1000[mm] |
| 重量 | 10[kg] |
| 自由度 | 17 (脚: 10, 腕: 6, 頭: 1) 脚は平行リンク機構 |
| フレーム | アルミ板金, カーボンファイバーCFRP |
| アクチュエータ | サーボモータ VS-SV3310, VS-SV1150 (ヴイストン), MX-28R (Robotis) |
| センサ | ジャイロセンサ (3軸) 加速度センサ(3軸) |
| 運動制御コントローラ | はじめコントローラ HC (ARM Cortex-M4) |
| 自律制御コントローラ (オプション) |
PCボード |
| カメラ (オプション) | 広角レンズのUSBカメラ |
| バッテリ (オプション) | リチウムポリマー(Li-Po) 14.8[V] |
| 運動制御コントローラの開発環境 | Cコンパイラ, RTM (リアルタイムモニタ), MLD (モーションローダ), C言語ソースプログラム |
| 自律制御コントローラの開発環境 (オプション) | Windows OS, Microsoft Visual Studio |
| 特長 | 高速歩行 全方向歩行 ボールキック動作 起き上がり動作 |
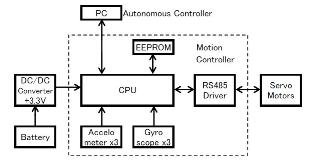
ヒューマノイドロボットのシステム構成
-

- ロボカップのCIT Brainsチーム(千葉工業大学)・・・※外装デザインはCIT Brainsによるものである
-

- 中型ヒューマノイドロボットの調整の様子
-

- はじめロボット39号機の3D CAD画像
-

- 外装デザインを施したはじめロボット36号機の3D CAD画像
動画