ロボットプロジェクトの概要
巨大ヒューマノイドロボット(ロボットアニメ「機動戦士ガンダム」のモビルスーツ)の開発を目標にして2010年に身長4メートルのロボットプロジェクトをスタートしました。現実の世界では、人間のように二本の足で歩く巨大なロボット
の開発は、世界でも例がなく非常にチャレンジングな目標です。ロボットの胴体下部のハッチを開き、コックピットに搭乗します。頭部カメラの映像を表示したディスプレイを見ながら、ジョイスティックとマスター操縦装置(人形を操るとロボットも同じ動きをするもの)で操縦します。
我々のプロジェクトに対してスポンサー・協力者を募集しています。
本プロジェクトの最新の状況はYouTube動画とfacebook “4M ROBOT”で発信しています。
-

- 身長4メートルの二足歩行ロボット

-

- 4メートルロボットの搭乗体験

開発経緯
はじめ研究所は、2002年に小型二足歩行ロボット(1号機)の開発を始めました。2007年には身長1メートルのヒューマノイド(25号機)、2009年には世界最大級の身長2メートル10センチメートルのヒューマノイド(33号機)が完成しました。2018年、4メートルロボット(43号機)の二足歩行による動歩行が完成しました。
次の目標は、身長8m。最終的には身長18mのガンダムサイズ(モビルスーツサイズ)を目標としています。
以下に4mロボットの開発経緯を画像でご紹介します。
-

- 開発ミーティング
-
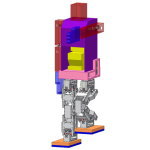
- 4mロボットの3D画像
-
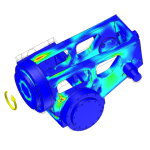
- 脚の関節部の構造解析シミュレーション
-

- 脚の関節部の加工・組立(有限会社吉則工業)
-

- モータの負荷試験(有限会社吉則工業)
-

- 脚の関節部
-

- 脚の関節部の荷重試験(株式会社三木製作所にて)
-

- フレームのレーザーカット(ニシザキ株式会社)
-

- 股のフレームの板金加工(ニシザキ株式会社)
-
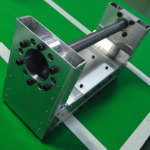
- 股のフレーム(アルミBOX構造)
-

- フレームの接着
-

- 片足完成
-

- 腰部のコックピット(有限会社アラキ)
-

- 下半身の組立
-

- ロボット移動用台車(有限会社アラキ
-

- ロボットがしゃがんで搭乗
-

- ロボットに搭乗して歩行
-

- ロボットの胴体内に搭乗して歩行
-

- 歩行操縦用ジョイスティック
-

- 上半身操縦用マスタースレーブ
-

- 5本指の手(開閉可)
-

- 頭部(カメラ、ライト)
-

- コックピットの入口ハッチ開
動画